变换矩阵
矩阵的本质
矩阵和线性方程组
矩阵可以用于表示一个线性方程组:
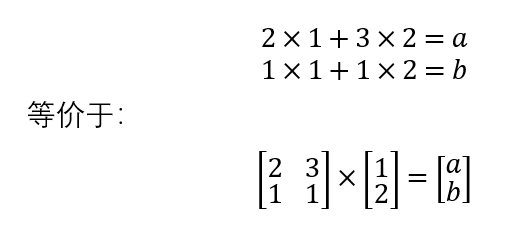
这里用一个2x2矩阵和一个列向量(2x1矩阵)相乘,得到一个列向量(2x1矩阵)。根据矩阵乘法公式,我们很容易发现这两者是等价的。
注:数学中,更一般的线性方程组类似下面这种形式:
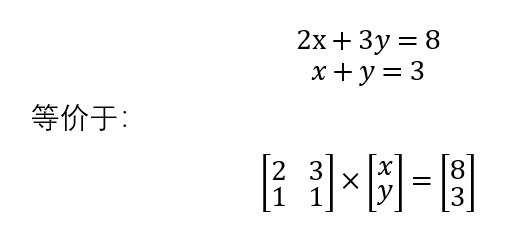
那么如何用矩阵的算法求出x和y呢?我们可以算出2x2矩阵的逆矩阵,然后和右侧相乘,接下来就和上面的形式一样了。
矩阵和变换
很显然,之前我们对[1, 2]这个列向量进行了某种线性变换得到了[a,b],我们可以将这种一个矩阵乘一个列向量的形式,理解为一个向量从一个坐标系到另一个坐标系的映射,矩阵就是这种映射的一个关系参数,而逆矩阵就是一个反向的映射。
变换空间中的向量就是矩阵的用途,在3D中就是平移、旋转、缩放等变换。
变换矩阵相乘
由于矩阵乘法满足结合律,多个变换矩阵应用到一个列向量时,可以先计算出这些变换矩阵的乘积,再用乘积乘列向量。
D3DXMATRIX
D3DX中,操作的是三维空间,使用D3DXMATRIX,表示一个4×4矩阵。
为什么是4×4而不是3×3呢?这涉及到一个(x,y,z)这样的数据结构表示的究竟是一个点还是一个向量。点代表一个空间中的位置,而向量代表一个有方向和长度的量。
因为三维向量只包含了长度和方向的信息,而没有位置信息,因此3×3矩阵无法做到在不添加额外参数的情况下,只用一个变换矩阵乘向量实现一个点平移、镜像等需要位置信息的变换,因此添加了一个维度。具体原理其实很容易证明。
那么假如现在有一个复杂的变换矩阵实现了某个功能,我们如何填充(x,y,z)到一个四维结构中呢?如果它代表一个点,就用(x,y,z,1),如果代表一个向量,就用(x,y,z,0)以屏蔽对向量没有意义的位置操作。最后一个维度仅仅是便于操作之用。点变换后,新添加的分量如果不是1,我们就将其映射为1,这样我们就重新回到了三维空间(可以类比为三维空间中把z分量映射为1,效果就像把立体对象拍扁了一样,这里不过这里是从四维到三维)。
具体看下面三个变换的例子就清楚了。我们把这个添加的维度记为w。
当然,我们并不需要手动进行这些操作,我们代码中操作的就是D3DXVECTOR3不用变,只不过心里知道调用变换矩阵的时候,会填充一位并和矩阵相乘。
针对一个3维向量应用一个变换代码:
D3DXVec3TransformCoord(&v, &u, &matrix);
- D3DXVec3TransformCoord:变换后自动将结果映射到w分量为1的情况,用于点的变换
- D3DXVec3TransformNormal:将w分量设为0,w维度不参与变换,用于向量变换
- D3DXVec3TransformCoordArray/D3DXVec3TransformNormalArray:用于点和向量数组的批量变换
- D3DXVec3Transform:变换后不会自动将向量映射到w分量为1的情况,一般不用这个
常用的变换矩阵例子
平移、旋转、缩放是最常用的三个变换,这里我们以此为例加深对变换矩阵的理解。
实际上,我们编程中不用写这些基础的变换矩阵的代码,D3DX都为我们封装好了,我们调用一下就可以了。
平移变换
平移变换矩阵T,其中X轴平移分量为Px,Y轴平移分量为Py,Z轴平移分量为Pz。
现在要将点(x,y,z)进行平移,我们只需要将其填入u=(x,y,z,1),乘下面这个变换矩阵,算出T×u即可:
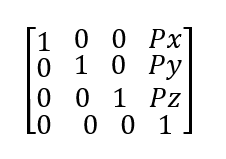
显然,T×u得到的结果就是(x+Px,y+Py,z+Pz,1)。
注:《DirectX9.0 3D游戏开发编程基础》这本书中约定变换向量是行向量乘以变换矩阵,而且图还都是左手系,这些设定和我们国内大学教的恰好相反,让人很不适应。我这里还是按照中国的习惯,使用矩阵乘以列向量。
沿X轴平移1.0f的例子代码:
D3DXMATRIX matrix;
D3DXVECTOR3 u(1.0f, 0.0f, 0.0f);
D3DXVECTOR3 v;
D3DXMATRIX matrix;
D3DXMatrixTranslation(&matrix, 1.0f, 0.0f, 0.0f);
D3DXVec3TransformCoord(&v, &u, &matrix);
旋转变换
旋转变换其实高中阶段我们就可以得出了,我们可以这样来做:先计算出绕X轴、Y轴、Z轴旋转的变换矩阵,有需要时再合成到一起。绕某一坐标轴旋转,其实是个二维问题。
另外一点,旋转角度这里我们遵循右手系和右手定则,你可以理解为:X轴超右,Y轴朝上,那么Z轴朝向你,在XOY平面旋转逆时针为旋转正方向。
我们根据旋转的两个特点进行推导:
- 圆半径不变
- 三角函数公式:
sin(a+b)=sin(a)sin(b)+cos(a)cos(b)等
由于我的笔记工具不适合写太多公式,这里就略过推导过程,直接给出书上的答案。
绕X轴旋转:
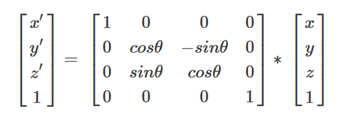
绕Y轴旋转:
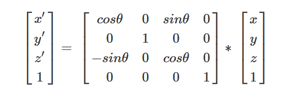
绕Z轴旋转:
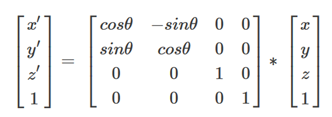
注:和《DirectX9.0 3D游戏开发编程基础》这本书中是反的。
将(1,0,0)沿Z轴旋转90度例子:
D3DXVECTOR3 u(1.0f, 0.0f, 0.0f);
D3DXVECTOR3 v;
D3DXMATRIX matrix;
D3DXMatrixRotationZ(&matrix, D3DXToRadian(90));
D3DXVec3TransformCoord(&v, &u, &matrix);
缩放变换
缩放变换比较简单,变换矩阵形式如下:
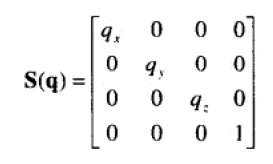
缩放就是将一个点的X、Y、Z三个分量分别缩小或扩大若干倍,就能实现了。
将X轴缩放为原来一般的例子代码:
D3DXVECTOR3 u(1.0f, 0.0f, 0.0f);
D3DXVECTOR3 v;
D3DXMATRIX matrix;
D3DXMatrixScaling(&matrix, 0.5f, 0.0f, 0.0f);
D3DXVec3TransformCoord(&v, &u, &matrix);